내연기관
HOME 내연기관 자율주행
Autonomous Driving
자율주행
자율주행자동차(Self-Driving Car)
스마트자동차의 개념 기계중심의 자동차 기술에 최신 전기, 전자, 정보통신 기술을 융복합해 교통사고를 획기적으로 저감하고, 탑승자의 만족을 극대화 시키는 기술이 접목된 자동차
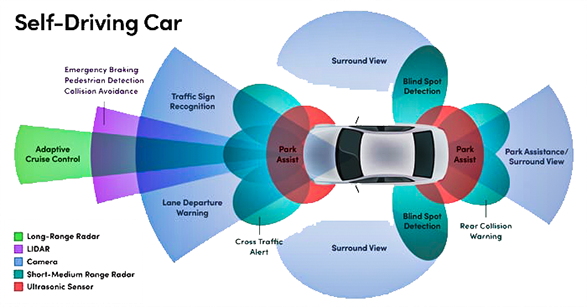
자율자동차 프로세스는 크게 인지, 판단, 제어이며 각 기기간 통신에 의해 제어됨
핵심부품으로는 카메라/레이더/라이다가 있음
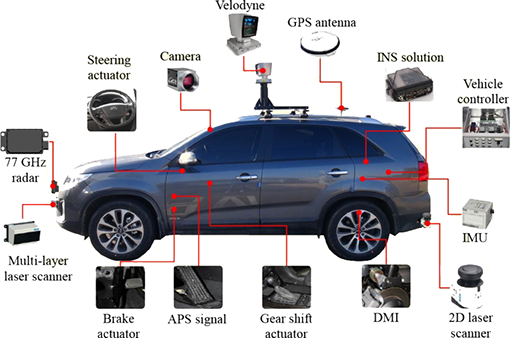 자율주행자동차의 핵심부품들
자율주행자동차의 핵심부품들

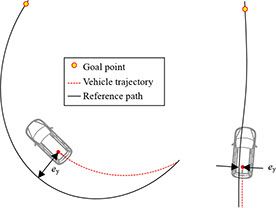
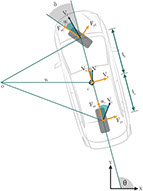
자율주행차의 경로추적 제어기 검토 및 성능평가
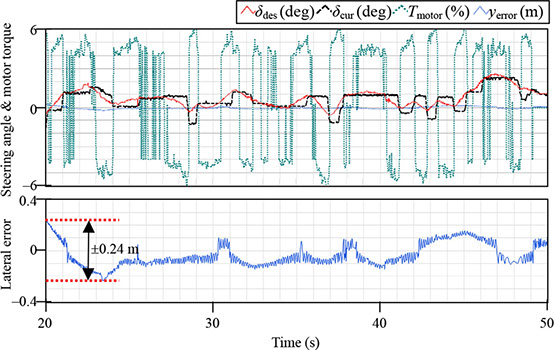
AV의 PTC는 차량 다이내믹가 AV의 경로 플래너 간의 인터페이스이며 이장치는 조향 및 측면 제어와 같은 차량의 승차 및 핸들링 제어 하위 시스템에 엑세스할 수 있으므로 정확한 경로 추적 작업을 구현하는 동시에 차량의 동적동작을 향상시키는 데 사용할 수 있다.
AV의 PTC는 일반적으로 IMU-GPS정보와 같은 감각피드백에 접근하여 폐쇄 루프 제어 방식을 구성하기 위해 사용하며 제어기술 이 오류 및 기타 가능한 목표를 최소화하는 역할을 하는 반면, PTC의 성능은 제어 체계의 정확성 및 견고성뿐만 아니라 차량 모델의 복잡성을 비롯한 여러측면에 따라 달라지는데 문헌에서 AV용 PTC의 설계 및 구현은 여러 연구에서 조사된바
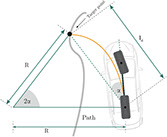
현재 연구의 범위를 대상은 자동차와 유사한차량 및 차동 구동 모바일 로봇과 같은 비 홀로노믹 제약으로 인해 제어가능성이 제한된 AGV(자율지상차량)의 PTC에 중점을 두고 연구함